| (һ) ��Փ���A(ch��)
���ǻیW(xu��)�顱�����C���˲��ý�(j��ng)������қQ����Փ( self-determination theory) ( Ryan �� Deci��2000)�����O(sh��)Ӌ����Փ���A(ch��)�c����ԭ�t�����қQ����Փ����������W(xu��)�������( Richard Koestner) ����������ڽ�������W(xu��)���I(l��ng)��(y��ng)�ÏV����ԓ��Փ�J(r��n)�飬���w �����N��������������������( autonomy) �����θ�( competence) �����Լ��P(gu��n)ϵ��( relatedness)�����@�����������õ��M��r�����w�ă�(n��i)���әC�͕�������ͬ�r�����M�ⲿ�әC�ă�(n��i)�������MĿ��(bi��o) ���_(d��)���c���w�ij��L������������N��������õ��M�㣬�W(xu��)��(x��)�߿��ԫ@�����õČW(xu��)��(x��)�w�ͼ����K�����W(xu��)��(x��)Ч���cЧ�ʡ������қQ����Փ�����N���������������A(ch��)( Lu et al����2018) ���҂��_���ˡ��ǻیW(xu��)�顱�����C���˵��O(sh��)Ӌԭ�t:
1��������
������ָ���w�ڳ���˽₀����Ը�����^�h(hu��n)���Ļ��A(ch��)�ϣ��������О��������ɶ��Ǐ����x��ĸ��ܡ��@�N�����x���܉�����(d��o)���w�a(ch��n)���������������������ڂ��w���L���О飬�ٳ����(n��i)�ڄәC���������dȤ���ӱ����Ę�Ȥ�M���x��(n��i)�ڄәCͨ���ܴ�ʹ���w�_չ����ˮƽ�҄�(chu��ng)���ԵČW(xu��)��(x��)���܉����X�\����Ч�ČW(xu��)��(x��)���ԣ��挦���yҲ���܈Գ֡��� �ˣ�ᘌ��W(xu��)��(x��)�������е����������҂���������C���˵����l�O(sh��)Ӌԭ�t: 1) ��W(xu��)��(x��)���ṩ�������Ͻ̌W(xu��)Ҏ(gu��)���Һ����ČW(xu��)��(x��)����x��; 2) �˽�W(xu��)��(x��)�ߌ���(d��ng)ǰ�W(xu��)��(x��)��(n��i)�ݵĸ��ܲ�������(y��ng)�ķ������{(di��o)��; 3) �M���p�ٌW(xu��)��(x��)��ӌ��W(xu��)��(x��)�ߵĉ������c�����ƸС�
Ҫ�o�W(xu��)��(x��)���ṩ��ͬ�ČW(xu��)��(x��)��Ӽ��x��һ������Ҫ���O(sh��)��ģ�B(t��i)�����|(zh��)���ČW(xu��)��(x��)�YԴ���M��W(xu��)��(x��)�߸���(j��)�������c�_չ�W(xu��)��(x��)������; ��һ����Ҫ���ú����ƌW(xu��)�ķ�ʽ���W(xu��)��(x��)�YԴ���̌W(xu��)Ŀ��(bi��o)���̌W(xu��)������M����Ч�M���ͼܘ�(g��u)�����ú��Ρ��ѺõĿ�ҕ����ʽ��֧�W(xu��)��(x��)���c�W(xu��)��(x��)��(n��i)���g�����ɽ����c�x����ˣ��O(sh��)Ӌ���͵Ľ���֪�R�D�V�����W(xu��)��(x��)�߮�(d��ng)ǰ���J(r��n)֪��B(t��i)�M�ЯB�ӣ��Ɏ����W(xu��)��(x��)�߿��^�J(r��n)�R����W(xu��)��(x��)��B(t��i)������(d��o)�W(xu��)��(x��)���x��W(xu��)��(x��)�YԴ����Σ����r�˽�W(xu��)��(x��)�ߌ��W(xu��)��(x��)��(n��i)�ݵĸ��ܲ�������(y��ng)�ķ������{(di��o)������Ҫ�����C�����܉�ͨ�^��ͬe�Ă��������r�ɼ��c�����W(xu��)��(x��)�ߵ��^�����c�y�u�ԌW(xu��)��(x��)��Ӕ�(sh��)��(j��)��������(j��)�J(r��n)֪�ƌW(xu��)����Փ�O(sh��)Ӌ����(y��ng)�ķ������ӑB(t��i)�{(di��o)���W(xu��)��(x��)��(n��i)�ݡ����磬�Ɣ��W(xu��)��(x��)�������ϵK���д���ʮa(ch��n)�����ɻ���w�r�������C���˿��Լ��r�ṩ�W(xu��)��֪�R�����Լ�֧��ʽ�̌W(xu��)��������A(y��)��������뼤��C���c���ɭh(hu��n)��(ji��)���ɱM���p�ٌW(xu��)��(x��)��ӌ��W(xu��)��(x��)�ߎ����ĉ������c�����ƸС���Ч�ļ����܉�W(xu��)��(x��)�ߵľo���������ڌW(xu��)��(x��)�M�̵ķ�(w��n)�����M; �m��(d��ng)?sh��)ķ��ɷ��^�����Ԝp�p�W(xu��)��(x��)�ı����ƸС�
2�����θ�
���θ�ָ�W(xu��)��(x��)����ɌW(xu��)��(x��)�΄�(w��)��y�u�^���У�����������(zh��n)���ƿظ��c�e�O�����ҿ϶�������W(xu��)��(x��)���܉���m(x��)�w���θУ����(n��i)���әC���Եõ���������֮����(d��o)�´씡�С���ˣ�ᘌ��W(xu��)��(x��)�ߌ����θе����������҂���������C���˵ăɗl�O(sh��)Ӌԭ�t:1) ��(zh��n)�_��Ӌ�W(xu��)��(x��)�ߵ�֪�R���ճ̶��c�������Ą�W(xu��)��(x��)���_չ�ߌӼ�֪�R�ČW(xu��)��(x��)��������(d��o)��W(xu��)��(x��)���� ������(zh��n)�ԃ�(n��i)�ݡ�2) ���r�϶��W(xu��)��(x��)�����_��(y��ng)������(zh��n)��ȡ�õ��M����
�@��Ҫ���W(xu��)��(x��)�ߵ�֪�R����ˮƽ���W(xu��)���������P(gu��n)�Iָ��(bi��o)�M�М�(zh��n)�_��ģ��ʹ�����C���˿��������_�ĕr�g�m��(d��ng)��ߌW(xu��)��(x��)��(n��i)�ݵ��y�Ⱥ�����(zh��n)��; ͨ�^��Ȼ�Z�Խ����ȷ�ʽ�Ą��c�϶��W(xu��)��(x��)�ߵ��P(gu��n)�I���M���������W(xu��)��(x��)�ߑ�(y��ng)���µČW(xu��)��(x��)����(zh��n)�ă�(n��i)���әC��
3���w�ٸ�
�w�ٸ�ָ�W(xu��)��(x��)����Ҫ�����܇��h(hu��n)���c�W(xu��)��(x��)���Ĝ�ͨ�������c֧�֡����õ��P(gu��n)���c��ͨ���Դ��M�W(xu��)��(x��)��������(n��i)���әC���������Ч����A(y��)���ČW(xu��)��(x��)��(n��i)�ݺ��΄�(w��)����ˣ�ᘌ��W(xu��)��(x��)�ߌ��w�ٸе����������҂���������C���˃ɗl�O(sh��)Ӌԭ�t: 1) ���c�W(xu��)��(x��)�߽����r���C���˱M���܂��_(d��)���c�W(xu��)��(x��)��ֱ�����P(gu��n)�Ă��Ի��c��(bi��o)־����Ϣ��2) �缼�g(sh��)�l���ͽ̌W(xu��)�M�����S���C���˿��Ժ͌W(xu��)��(x��)�ߓ�C�_չ�c�̌W(xu��)��(n��i)�ݟo�P(gu��n)�Ľ����͜�ͨ��
���������O(sh��)Ӌԭ�t�������C�����c�W(xu��)��(x��)�ߵĽ����M���ܲ��û��ڌW(xu��)��(x��)�߂�����Ϣ�Ă��Ի�������ʽ�̓�(n��i)�ݣ��������(j��)�W(xu��)��(x��)�ߵ��Ԅe����������(j��ng)�v���O(sh��)�Æ����Z�Ȍ�(d��o)����Ϣ����Ȼ���_(d��)���W(xu��)��(x��)�ߵ����ء�ϲ���c�H�ܡ�ͬ�r���O(sh��)Ӌ�ǽ̌W(xu��)��;�����쌦Ԓ��ʹ�W(xu��)��(x��)���c�����C����֮�g�a(ch��n)��ֱ�ӡ�(li��n)ϵ���������W(xu��)��(x��)�ߵĚw�ٸС�
(��) �P(gu��n)�I֧�μ��g(sh��)
Ҫ�䌍�����������қQ����Փ������������C����ϵ�y(t��ng)���O(sh��)Ӌԭ�t����Ҫ���ö��ǰ�ؼ��g(sh��)�������P(gu��n)�I֧�κ��܌��F(xi��n)���ϡ�
1��֪�R�D�V���g(sh��)��(g��u)�������J(r��n)֪�؈D
֪�R�D�V���g(sh��)ͨ��ָ���þ��нY(ji��)��(g��u)���Z�x֪�R�ĸ���W(w��ng)�j(lu��)������ͨ���I(l��ng)���ֱ�I(l��ng)��Č��w�Լ��@Щ���w�g�P(gu��n)(li��n)��֪�R��ʾ������֪�R�D�V���g(sh��)���ԽY(ji��)��(g��u)����ʾ�̌W(xu��)�^���漰�IJ�ͬ���^���w����֪�R�c���̌W(xu��)Ŀ��(bi��o)���W(xu��)�ƽ̲ĵȣ��Լ��@Щ���w�g���ڵľ��н������x�ĸ���J(r��n)֪�P(gu��n)ϵ����֪�R�c�g��ǰ�(q��)���^�P(gu��n)ϵ����(x��)�}�c�W(xu��)��(x��)Ŀ��(bi��o)�g���u�y�����P(gu��n)ϵ�ȡ�ͬ�r������֪�R�D�V�B�ӌW(xu��)��(x��)��֪�R�c���ճ̶ȵ��J(r��n)֪��B(t��i)��Ϣ�������Mһ����(g��u)�������I(l��ng)����J(r��n)֪�؈D��ֱ�^�ʬF(xi��n)�o�W(xu��)��(x��)�ߣ������W(xu��)��(x��)���˽���W(xu��)��(x��)�M�̺����ճ̶ȡ�
�ڡ��ǻیW(xu��)�顱�����C�����У�����֪�R�D�Vһ��������W(xu��)�ƌ��I(y��)֪�R�c�̌W(xu��)���P(gu��n)����w�ĵӔ�(sh��)��(j��)���A(ch��)�c�����Y(ji��)��(g��u)��֧�W(xu��)��֪�R�����܆����c�z���Ȼ�����������; ��һ���棬�����J(r��n)֪�؈D����ֱ�ӳʬF(xi��n)�o�W(xu��)��(x��)�ߣ��������˙C������������W(xu��)��(x��)�������x���c�{(di��o)���W(xu��)��(x��)��(n��i)�ݡ�
2���C���W(xu��)��(x��)���g(sh��)��(g��u)���W(xu��)��(x��)��ģ��
�C���W(xu��)��(x��)���g(sh��)ͨ��ָ���Ô�(sh��)��(j��)��������(j��ng)��(y��u)��Ӌ��C��������ܺ͘�(bi��o)��(zh��n)�ļ��g(sh��)�������˹������I(l��ng)���Mչ�����P(gu��n)�I���g(sh��)֮һ���������ܽ����C���˵Ę�(g��u)����������Ҫ���á������C���˹�Ӌ���Д� �W(xu��)��(x��)���J(r��n)֪��B(t��i)�͌W(xu��)��(x��)�����Ļ��A(ch��)�nj��W(xu��)��(x��)�߽�ģ�����磬֪�Rۙ( knowledge tracing) �nj��W(xu��)��(x��)�ߵĄӑB(t��i)�J(r��n)֪�^���M��������ģ��ͨ������ؐ�~˹�� Փ��һ�A�R���ɷ�ģ�͙C���W(xu��)��(x��)�㷨���M�И�(g��u)������Ҏ(gu��)ģ�ھ��W(xu��)��(x��)������W(xu��)�Ɯy�u��Ϣ�IJɼ�����W(xu��)��(x��)�߽�ģ�ṩ���S����Ӗ(x��n)����(sh��)��(j��)��ͬ�r���S����ȌW(xu��)��(x��)���g(sh��)�İl(f��)չ�����������(j��ng)�W(w��ng)�j(lu��)�ȼ��g(sh��)�����֪�Rۙģ�Ϳ���ֱ�ӎ�����Q��֪�R�c�ӑB(t��i)��ģ���P(gu��n)�I���}��
�ڡ��ǻیW(xu��)�顱�����C���˵Č��Hϵ�y(t��ng)���F(xi��n)�У��҂�������ȌW(xu��)��(x��)ģ�͘�(g��u)���˰���֪�Rۙģ��( Chen et al����2018) �ڃ�(n��i)��һϵ�ЌW(xu��)��(x��)��ģ�ͣ���C�����ṩ�W(xu��)��(x��)�߮�(d��ng)ǰ�W(xu��)��(x��)��B(t��i)�ĄӑB(t��i)��Ӌ��Ϣ��ʹ�C���˿��Լ��r�\����A(y��)�W(xu��)��(x��)�ߌW(xu��)��(x��)�ϵK�����y��ͬ�r�����^���(zh��n)�_�ČW(xu��)��(x��)���J(r��n)֪��B(t��i)����ϢǶ�����֪�R�D�V����(g��u)�������Ľ����J(r��n)֪�؈D��
3����Ȼ�Z��̎�����g(sh��)��(g��u)�������c��Ԓϵ�y(t��ng)
��Ȼ�Z��̎�����g(sh��)�����ÙC���������Ȼ�Z�� �M�����⡢̎�����\�õļ��g(sh��)���Ǯ�(d��ng)ǰ�˹������I(l��ng)�������(zh��n)�Ե����I(l��ng)��֮һ���ڽ����C���˵�ϵ�y(t��ng)��(g��u)���У�������Ȼ�Z��̎�����g(sh��)�Ć���ϵ�y(t��ng)�c����ϵ�y(t��ng)��֧�W(xu��)��(x��)���c�C������Ч�̌W(xu��)���P(gu��n)�I�����h(hu��n)��(ji��)������ϵ�y(t��ng)ͨ��ͨ�^���W(xu��)��(x��)���ᆖ�M���Z�x�����c�����������ڵ�֪�R�D�V��֪�R���Ч�z���������Ϣ����ȡ����Ϣ����K���ɌW(xu��)��(x��)�߿��Խ��ܺ��������Ȼ�Z�ԑ�(y��ng)�𡣌�Ԓϵ�y(t��ng)ͨ�����΄�(w��)��(d��o)���͌�Ԓϵ�y(t��ng)�ͷ��΄�(w��)��(d��o)���͌�Ԓϵ�y(t��ng)���΄�(w��)��(d��o)���͌�Ԓϵ�y(t��ng)ּ�ڎ����Ñ�����ض��΄�(w��)�����΄�(w��)��(d��o)���͌�Ԓϵ�y(t��ng)�]���������΄�(w��)����Ҫģ�����c��֮�g����ȷǽY(ji��)��(g��u)�Ԍ�Ԓ�c������
�ڡ��ǻیW(xu��)�顱�����C�����У��҂�ͬ�r���놖�������c��Ԓ�������棬֧�W(xu��)��(x��)�ߵIJ�ͬ���������挣ע��̎��W(xu��)��(x��)������ČW(xu��)�ƽ̌W(xu��)�֪�R���}��ͨ�^���ӽ���֪�R�D�V�M�ЈD����������Ȼ�Z�Դ𰸡���Ԓ����������Ҫ֧�W(xu��)��(x��)���c�C���˵��e�Ĺ��ܣ���ͨ��֪�R�D�V����ȌW(xu��)��(x��)ģ��֧��ԓ���ֹ��ܵČ��F(xi��n)��
4�����Ӌ�㼼�g(sh��)��Ӌ�W(xu��)��(x��)��w�c��ע��
���Ӌ�㼼�g(sh��)ͨ��ָ�c���������P(gu��n)����Դ����л��܉�?q��)����ʩ��Ӱ푵ļ��g(sh��)����Ŀ�����x��C���R�e�����⡢���_(d��)���m��(y��ng)��������������(chu��ng)��������Ч���˙C�����^�̡����磬ͨ�^Ӌ��Cҕ�X���������r�ɼ��ͷ����W(xu��)��(x��)�ߵ��沿��������w�ˑB(t��i)���P(gu��n)�I��Ϣ��ݔ�������䐂���@Ӡ����w�Y(ji��)����ͬ�r���Y(ji��)�Ϯ�(d��ng)ǰ�W(xu��)��(x��)��(n��i)�ݵ��y�ȡ��W(xu��)��(x��)���������J(r��n)֪�ƌW(xu��)��Փ�ɹ�Ӌ���A(y��)�y�W(xu��)��(x��)�ߵČW(xu��)��(x��)��w�͌�ע�ȵȌW(xu��)��(x��)��B(t��i)ָ��(bi��o)�����̌W(xu��)�������r�{(di��o)�������A(y��)���������F(xi��n)���Ի��Ľ̌W(xu��)����(w��)�c�龳��֪��
���ÙC���˵�ǰ�Ôz���^�Ȃ������O(sh��)�䣬�҂������ˌW(xu��)��(x��)��w�R�eģ�ͣ������^��(zh��n)�_���Д��W(xu��)��(x��)�ߌ��W(xu��)��(x��)��(n��i)�ݮa(ch��n)����ؓ(f��)����w��ͬ�r���҂������ �W(xu��)��(x��)������� LEARNSense( Lu et al����2017) ��ԓ��ܻ��ڌW(xu��)��(x��)�ߌW(xu��)��(x��)�О�̈́�������Ϣ���Y(ji��)���J(r��n)֪�ƌW(xu��)�Ľ�(j��ng)����Փ����Ӌ�W(xu��)��(x��)�ߌW(xu��)��(x��)��ע�ȣ���K��(g��u)�����Ӌ�����棬���F(xi��n)�����C���ˌ��W(xu��)��(x��)�ߌW(xu��)��(x��)��Р�B(t��i)�Ĝ�(zh��n)�_��֪���R�e��
����ϵ�y(t��ng)�ܘ�(g��u)�c���F(xi��n)
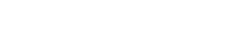
�������Ͻ�������W(xu��)��Փ���A(ch��)���˹������I(l��ng)�� ���P(gu��n)�I֧�μ��g(sh��)���҂������ǻیW(xu��)�顱�����C�����M ����ϵ�y(t��ng)�ܘ�(g��u)�O(sh��)Ӌ�c���F(xi��n)( Ҋ�D 1) ����ϵ�y(t��ng)������ԣ����ǻیW(xu��)�顱�����C���˷փɴ����ģ�K: 1) ���ڙC����Ӳ��ϵ�y(t��ng)�Ľ̌W(xu��)����ģ�K; 2) ���ڡ��ǻیW(xu��)�顱����(w��)ƽ�_�Ĕ�(sh��)��(j��)�c�YԴģ�K���ɴ����ģ�Kͨ�^��(li��n)�W(w��ng)�M����Ϣ��ݔ���������У�����(w��)���˵ġ��ǻیW(xu��)�顱����(w��)ƽ�_�ṩ�W(xu��)��(x��)���A(ch��)��(sh��)��(j��)�ͽ̌W(xu��)�YԴ���͑������ЙC���˵�Ӳ��ϵ�y(t��ng)��ɽ̌W(xu��)�������ܡ�
(һ) �̌W(xu��)����ģ�K
�̌W(xu��)����ģ�K�ǡ��ǻیW(xu��)�顱�����C���˵ĺ� ��ģ�K��ؓ(f��)؟(z��)�C���˵Ľ̌W(xu��)�^�̼��c�W(xu��)��(x��)�߽������ܵČ��F(xi��n)������O(sh��)Ӌ����������棬�����Ӌ�����桢��������͌�Ԓ�������档
1�����Ӌ������
��ǰ���������Ӌ��������Ҫ���ڷ���Ӌ�㡢Ӌ��Cҕ�X�ȼ��g(sh��)��ؓ(f��)؟(z��)��Ɍ��W(xu��)��(x��)�ߵČW(xu��)��(x��)��w���W(xu��)��(x��)��ע�ȵȠ�B(t��i)�cָ��(bi��o)���R�e�c��Ӌ���W(xu��)��(x��)�ߵı�����Է�ӳ�W(xu��)��(x��)����w�͠�B(t��i)����ˌ��r�˽�W(xu��)��(x��)�ߵČW(xu��)��(x��)��B(t��i)���o�茍�r�����c�̌W(xu��)֧������Ҫ���á����ǻیW(xu��)�顱�����C��������Ӌ��Cҕ�X���g(sh��)�ľ��e��(j��ng)�W(w��ng)�j(lu��)���ģ�ͣ�����(j��)�W(xu��)��(x��)�ߵ��沿���� ��������(x��)�ֳ��˷N������w�ĸ���ֵ���քe�鑍ŭ���p����������¡��������@Ӡ���䐂�c���ԡ���(d��ng)��ŭ���p���ǰ���N��w�ĸ���ֵ֮�ͻ��߆�һ��w�ĸ���ֵ�����ֵ�����Д��W(xu��)��(x��)��̎��ؓ(f��)��ČW(xu��)��(x��)��w���෴����(d��ng)��ŭ���p���ǰ���N��w�ĸ���ֵ֮��С���ֵ�����䐂�ĸ���ֵ�����ֵ�������Д��W(xu��)��(x��)��̎����������ČW(xu��)��(x��)��w��
�W(xu��)��(x��)��ע�������W(xu��)��(x��)�ߵ�Ŭ���̶Ⱥ�Ͷ��̶ȣ�ͬ�r�����W(xu��)��(x��)���J(r��n)֪ϵ�y(t��ng)���\�D(zhu��n)Ч�ʺ͌��W(xu��)��(x��)��(n��i)�ݵ��dȤ( Trowler��2010) ����(d��ng)�W(xu��)��(x��)��̎���^��ˮƽ�ČW(xu��)��(x��)�����ȕr��ͨ����ȡ���^�õČW(xu��)��(x��)Ч��������J(r��n)֪�̶ȣ��@�r���Ԇ��Ӽ���C�ƴ��M��ˮƽ�W(xu��)��(x��)��ע�ȵij��m(x��)����(d��ng)�W(xu��)��(x��)��̎���^��ˮƽ�ČW(xu��)��(x��)��ע�ȕr��ͨ���y���_(d��)���A(y��)���W(xu��)��(x��)Ч�����J(r��n)֪�̶ȣ�������Ҫ��ȡ���A(y��)��ʩ����һ���棬�W(xu��)��(x��)��ע�����[���Ժ͕r׃�ԣ�ͨ�^�W(xu��)��(x��)����ꐈ��ͽ̎��u�r����ʽ�����^��(sh��)��(j��)ͨ�����y��(zh��n)�_���B�m(x��)���u���W(xu��)��(x��)�����ȡ�������������c�J(r��n)֪�ƌW(xu��)�о�( Chi �� Wylie��2014) �ѽ�(j��ng)�C������ͬ���e�Č�ע�ȿ���ͨ�^�W(xu��)��(x��)�^�̵����@�О�( overt behavior) ��Ч�Ɣࡣ��ˣ����ǻیW(xu��)�顱�C�������R�e�W(xu��)��(x��)�ߵ��沿�����c֫�w���������@�О���A(ch��)�ϣ��Y(ji��)�� LEARNSense ( Lu et al�� ��2017) �ȌW(xu��)��(x��)������ܣ���Ӌ�W(xu��)��(x��)�ߵČW(xu��)��(x��)��ע�ȡ�
���������C���ˌ��W(xu��)��(x��)����w�c��ע�ȵ��R�e�c��Ӌ����������߽����C���˵ĸ�֪�����،��c�W(xu��)��(x��)��֮�g�Ľ��������������C���˵������ԣ�ͬ�r������C���˵Ľ̌W(xu��)�����ṩ���A(ch��)��Ϣ����W(xu��)��(x��)���ṩ�����c���֧�֣������W(xu��)��(x��)�ߵ������ԣ���K��W(xu��)��(x��)�ߵ��J(r��n)֪�^���ṩ���r����(zh��n)�_���m��(d��ng)?sh��)ķ����c֧�֡�
2����������
����������Ҫͨ�^��Ȼ�Z�Խ����ķ�ʽ���ա�̎���͑�(y��ng)���W(xu��)��(x��)������ČW(xu��)�ƽ̌W(xu��)�֪�R���}������ϵ�y(t��ng)��Ҫ�����c�����W(xu��)��(x��)������Ć��}���W(xu��)����}�Ɇ�������̎���͑�(y��ng)��; ��t���Ɍ�Ԓ��������ؓ(f��)؟(z��)̎�������ڌW(xu��)�ƌ��I(y��)���}��������������{(di��o)�ÌW(xu��)��֪�R�D�V��Ȼ��ͨ�^�D�����ķ�ʽ�z�����������P(gu��n)��Ϣ�����ɌW(xu��)��(x��)�߿��Խ��ܺ��������Ȼ�Z�ԑ�(y��ng)�����磬�W(xu��)��(x��)���ᆖ�����˾Gɫֲ�߀����Щ��������M�й������?���������������Д�ԓ���}������W(xu��)�Ɔ��}��Ȼ���_ʼ������W(xu��)��֪�R�D�V���M�ЈD�����������z�����ġ��{(l��n)��(x��)�������ϼ�(x��)���� �����á�����Ϣ��ͨ�^��Ȼ�Z�����ɹ��ܣ��M�ɌW(xu��)��(x��)�߿�������Ĵ𰸣����磬���{(l��n)��(x��)�����ϼ�(x��)���������ö������M�й�����á���ͬ�r����ʹ�W(xu��)��(x��)���c�����C���˵Ľ����@���c�����̎��������w��������������Ȼ�Z��̎���������D(zhu��n)�Z�����ܣ��{(di��o)���C���ˑ�(y��ng)�𣬲�ģ����̎����Z�����Z�{(di��o)�����ӹĄ�Ԓ�Z���硰�@�����}���úܺã�߀�Єe�Ć��}��?����
�W(xu��)�Ɔ��������Ľ�������֧�W(xu��)��(x��)���c�C���� ��Ч�̌W(xu��)�����ı�Ҫ���P(gu��n)�I�h(hu��n)��(ji��)֮һ�����H�܉�(y��u) ����(ji��)ʡ�W(xu��)��(x��)�ߵ���Ϣ�����^���c�r�g����߽̌W(xu��) ������Ч�ʺ��������������������C����ָ��(d��o)�Ľ� �����c���I(y��)�ԡ�
3����Ԓ��������
�c�������治ͬ����Ԓ����������Ҫ֧�W(xu��)��(x��)���c�C���˵����Ɇ�����e�Ĺ��ܣ����W(xu��)��(x��)���C���˵��Z��������(n��i)�ݲ����̌W(xu��)����ͬ�r���^(q��)�e�ڂ��y(t��ng)���΄�(w��)��(d��o)���͌�Ԓϵ�y(t��ng)��ԓ��Ԓ��������o������Ñ�����ض��΄�(w��)����Ҫ����ͨ��֪�R�D�V����ȌW(xu��)��(x��)ģ�͵��P(gu��n)�I���g(sh��)��ģ�����c��֮�g�����_չ�ǽY(ji��)��(g��u)�Ԍ�Ԓ�c���������磬���ǻیW(xu��)�顱�����C ���˿������ܵذ�ο�W(xu��)��(x��)�ߵı�Թ( �硰�@�����}���y�������ҿ϶��W(xu��)��������) �����C���˱�����Ϣ��ԃ��( �硰�����ˡ����l����ĸ�ĸ����) �Լ���ͨ���I(l��ng)��ͺ�������֪�R���e�ġ����ǣ���������Ȼ�Z��̎�����g(sh��)��Ŀǰ���ǻیW(xu��)�顱�����C�����e�ĵ�����ˮƽ�о��ޡ�����C���˲����ҵ����Ի؏�(f��)�Ĵ𰸣�������������(d��o)�W(xu��)��(x��)�ص��W(xu��)��(x��)�M��( �硰�@�����}�Ҳ�������Ҫ���҂�߀���^�m(x��)���ŵČW(xu��)��(x��)��?��) �����⣬���ǻیW(xu��)�顱�����C���������沿�R�e���g(sh��)�Ԅ��R�e�W(xu��)��(x��)�����ݣ������e�ĵȭh(hu��n)��(ji��)�Ԅ�ʹ�ÌW(xu��)��(x��)�ߵ����֡��ǷQ�ȣ��������c�W(xu��)��(x��)��֮�g��(li��n)�Y(ji��)����ߌW(xu��)��(x��)��ʹ�ÙC���˵��dȤ��
(��) ��(sh��)��(j��)�c�YԴģ�K
��(sh��)��(j��)�c�YԴģ�K��������C���˵ӵ���Ϣ���A(ch��)ģ�K����Ҫ���á��ǻیW(xu��)�顱ƽ�_( ����Ȫ��2017)ͨ�^�W(w��ng)�j(lu��)��ݔ?sh��)�;����̌W(xu��)�^���Լ��˙C���������ṩ��(sh��)��(j��)�c�YԴ֧�֣������W(xu��)��֪�R�D�V������ԌW(xu��)��(x��)�YԴ���W(xu��)��(x��)�ߔ�(sh��)��(j��)�͂��Ի��J(r��n)֪�؈D��
1���W(xu��)��֪�R�D�V
��ǰ������֪�R�D�Vͨ��ָ����ͨ���I(l��ng)���ֱ�I(l��ng)��ĸ���w�Լ��@Щ���w�g�P(gu��n)(li��n)�ĽY(ji��)��(g��u)��֪�R�졣�Z�ġ���(sh��)�W(xu��)������vʷ�ȌW(xu��)�Ʊ��ژ�(g��u)�����ٵČW(xu��)��֪�R�D�V������ԓ�W(xu��)�ƽ̌W(xu��)�漰�IJ�ͬԪ�ؼ�Ԫ��֮�g���н������x����Ч�P(gu��n)ϵ���W(xu��)��֪�R�D�V��Ҫ����ԓ�W(xu��)�ƺ���֪�R�c֮�g���Z�x�P(gu��n)ϵ���γ�֪�R֮�g��߉�P(gu��n)(li��n)�W(w��ng)�j(lu��)��������Ч�M���̌W(xu��)���u �r�ȭh(hu��n)��(ji��)�a(ch��n)���Ĕ�(sh��)��(j��)����֪�R��(n��i)�ݺ͌W(xu��)��(x��)�ߞ���Č��W(xu��)��֪�R�D�V���Ԍ��F(xi��n)�Z�x��������������������C�������֪�R�̌W(xu��)�͌W(xu��)�Ɔ���ȡ�
2������ԌW(xu��)��(x��)�YԴ
�W(xu��)��(x��)��Ӽ�������W(xu��)��(x��)�YԴ�߂�������ԣ���Ҫ���Â��w��������W(xu��)��(x��)�О��M���YԴ�ۺϣ����������|(zh��)���ͽY(ji��)��(g��u)���̶ȡ�֪�R֮�g�ă�(n��i)���P(gu��n)ϵ�c�˵�����Խ����γɵ����c֪�R�����������֪�R�W(w��ng)�j(lu��)�������ڌW(xu��)��(x��)�YԴ����Ч�ۺ��c�|(zh��)��������ͬ�r���W(xu��)��(x��)�YԴ���ж�ģ�B(t��i)�ԣ���Ҫ���w�̲ġ��y�uԇ�}�Լ��n��(bi��o)��ȡ����У���ģ�B(t��i)�̲İ������|(zh��)����ҕ�l ��n�ȶ�ý�w�̌W(xu��)�YԴ���y�uԇ�}���������Z���R�e�ȼ��g(sh��)�M�д𰸲ɼ����W(xu��)��(x��)�YԴ߀Ҫ����(j��)�n�̽̌W(xu��)��V��(bi��o)��(zh��n)���M�м�(x��)�w����֪�R�c��(bi��o)ע��������(j��)�̌W(xu��)��V�ČW(xu��)��(x��)Ŀ��(bi��o)�����c�w������Ӽ��������Ի��J(r��n)֪�؈D������(zh��n)���]ʹ�á������C���˵�Ӳ��֧�ֶ�N�W(xu��)��(x��)�YԴʹ�ã���ҕ�l�̌W(xu��)�YԴ����ͨ�^�C���˵�ǰ����Ļ���ߺ���ͶӰ�ȣ���������չʾ�c���š�
3���W(xu��)��(x��)�ߔ�(sh��)��(j��)�c����
�W(xu��)��(x��)�ߔ�(sh��)��(j��)���w�W(xu��)��(x��)�߮a(ch��n)���ČW(xu��)��(x��)�y�u��(sh��)��(j��)���W(xu��)��(x��)�О锵(sh��)��(j��)�͌W(xu��)��(x��)��攵(sh��)��(j��)�����У��W(xu��)��(x��)�y�u��(sh��)��(j��)���О锵(sh��)��(j��)��W(xu��)��(x��)���������ṩ��Ϣ֧�֡��W(xu��)��(x��)�y�u��(sh��)��(j��)��Ҫ��Դ�ڌW(xu��)��(x��)�ߵĸ�yԇ�Y(ji��)���������W(xu��)��(x��)���������_�c��������r�L���P(gu��n)�I��Ϣ; �W(xu��)��(x��)�О锵(sh��)��(j��)�����W(xu��)��(x��)���c�C���˽����^����Ϣ���������еČW(xu��)�Ɔ����c���쌦Ԓ��(sh��)��(j��)���W(xu��)��(x��)���沿�����c�������^������Ϣ���ڴ˻��A(ch��)�ϣ��C�����Ԅ����ɌW(xu��)��(x��)���A���ԌW(xu��)��(x��)������棬���w���������e֪�R�c���c�C���˽̌W(xu��)�����Լ�ԇ�}�������r���ڌ��H�̌W(xu��)��(y��ng)����߀�������ɿ�ҕ�����ȡ�
4�����Ի��J(r��n)֪�؈D
�W(xu��)��(x��)�ߔ�(sh��)��(j��)�Ͷ�ģ�B(t��i)�̌W(xu��)�YԴ�����Mһ����(g��u)�ɌW(xu��)��(x��)�߂��Ի��J(r��n)֪�؈D( �f���i��2017) �����Ի��J(r��n)֪�؈D�Ԙ���W(w��ng)��Y(ji��)��(g��u)չ�F(xi��n)�W(xu��)�Ƽ�(x��)�w����֪�R�c��Ȼ����֪�R�c�ϯB�ӌW(xu��)��(x��)�߮�(d��ng)ǰ���J(r��n)֪��B(t��i)( ���Ƿ�����ԓ֪�R���W(xu��)��(x��)�c�y�u�M�ȵ�) ����ģ�B(t��i)�W(xu��)��(x��)�YԴ�Լ�ԓ֪�R�c����(y��ng)�Ľ̌W(xu��)Ŀ��(bi��o)�Ƚ̌W(xu��)�P(gu��n)�I����Ϣ�����Ի��J(r��n)֪�؈D��������Y(ji��)��(g��u)���Ļ����� Ϣ��������C���˵��όӽ̌W(xu��)����(w��)�ṩ��(sh��)��(j��)֧��( ��W(xu��)�Ɔ���֪�R�W(xu��)��(x��)��) ��Ҳ�����ÿ�ҕ���c������ʽֱ�ӷ����o�W(xu��)��(x��)�ߣ�ʹ�W(xu��)��(x��)���˽�������֪�R���ՠ�B(t��i)�����M�������J(r��n)֪�ͼ���W(xu��)��(x��)��߀�������ý����C���˵��|������Ӳ�����c�䂀�Ի��J(r��n)֪�؈D�����������x�����c��֪�R�c��Ԕ��(x��)��Ϣ�Ͷ�ģ�B(t��i)�W(xu��)��(x��)�YԴ�����]��
�C�����������ڽ̌W(xu��)��������(sh��)��(j��)�c�YԴ�ɴ����ģ�K�����wϵ�y(t��ng)�ܘ�(g��u)��ͬ�r���Ђ��Ի��J(r��n)֪�؈D����ģ�B(t��i)�̌W(xu��)�YԴ�Ȼ��A(ch��)�ԡ��Y(ji��)��(g��u)����Ϣ�����ǻیW(xu��)�顱�����C���˿��Ԍ��F(xi��n)�W(xu��)��(x��)��w�c��ע���R�e���W(xu��)�Ɔ����Լ����쌦Ԓ�Ƚ̌W(xu��)�c�������ܡ�
�ġ���(y��ng)��ģʽ
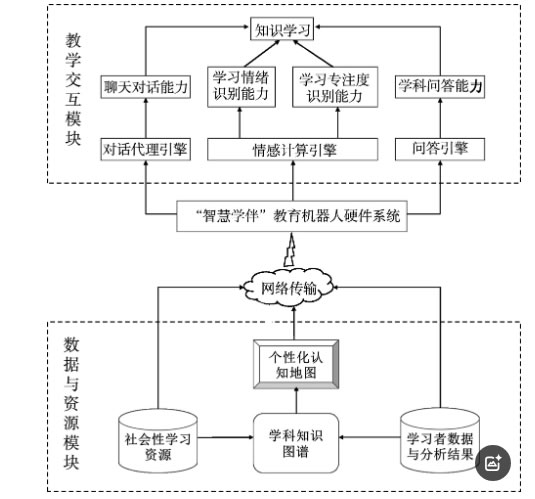
�ڌ��F(xi��n)ǰ��ϵ�y(t��ng)�ܘ�(g��u)�Ļ��A(ch��)�ϣ����ǻیW(xu��)�顱�����C�����܉�����W(xu��)��(x��)���ڼ�ͥ�h(hu��n)���Ľ���ָ��(d��o)�ߣ�������������I(y��)�ԡ����r�����c��֪���P(gu��n)�I�������O(sh��)Ӌ���ς��w�W(xu��)��(x��)�����c�ĵ��͑�(y��ng)��ģʽ����ɲ�ͬ�A�εĽ̌W(xu��)Ŀ��(bi��o)���M��W(xu��)��(x��)�ߌ��������С����θм��w�ٸеȺ�������( Ҋ�D 2) �����ǻیW(xu��)�顱�����C���˵ĵ��͑�(y��ng)��ģʽ�����W(xu��)��(x��)���y���𡢌W(xu��)�� ���������W(xu��)��(x��)�������ѡ��W(xu��)��(x��)��鼤��ͼ��L�����������
image.png
�D 2 ���ǻیW(xu��)�顱�����C���˵ĵ��͑�(y��ng)��ģʽ
(һ) �W(xu��)��(x��)���y����
���ǻیW(xu��)�顱�����C���˿����c�W(xu��)��(x��)�߹�ͬ���һϵ�ЌW(xu��)��(x��)��ӡ����ȣ��C���˻��ڃ�(n��i)�õĽ̌W(xu��)Ŀ��(bi��o)�c���m��(y��ng)�W(xu��)��(x��)·��������ģ�B(t��i)�W(xu��)��(x��)�YԴ��?q��)W��(x��)�߾���(zh��n)���]�ͽ���ʽ�v�ڣ��M��W(xu��)��(x��)�ߵ������С��ڴ��^���У��C�������S���Ą�W(xu��)��(x��)��������}����ͨ�^���������Ԅ�̎���ͽ�����漰��֪�R���}���Ą�W(xu��)��(x��)�����뷴˼���߷������|�l(f��)�W(xu��)��(x��)�ߵ�˼������Σ���(d��ng)�����Ҫ֪�R�c�Ľ̌W(xu��)�����C���˕����h�W(xu��)��(x��)����������}���ҵĜyԇ���yԇ��ʽ��������Ȼ�Z�ԣ�Ҳ�����ǽ��|�C����ǰ���|������ɣ��Ķ������W(xu��)��(x��)��얹�֪�R�c��Ҳ��C�����ṩ�W(xu��)��(x��)�����ՠ�B(t��i)�Ĝy�u��Ϣ�������ڙC���˜�(zh��n)�_��Ӌ�W(xu��)��(x��)���J(r��n)֪��B(t��i)��ͬ�r���W(xu��)У�ˌW(xu��)��(x��)�^���Ժ͜y�u�Ԕ�(sh��)��(j��)�Ĺ���������ߙC���ˌ��W(xu��)��(x��)�ߵ����⣬�����䃞(y��u)�ݻ��߱����Ŀ�Ŀ��֪�R�c���Ķ����õؽ���W(xu��)��(x��)�ߵ����y���}�����]��(y��u)�|(zh��)�̌W(xu��)�YԴ���ӑB(t��i)��(y��u)���W(xu��)��(x��)·����
(��) �W(xu��)�������
���ǻیW(xu��)�顱����(w��)ƽ�_�ČW(xu��)У�ˣ����Բɼ��W(xu��)��(x��)���L���ڡ���ģ�B(t��i)���^�����c�y�u�Ԕ�(sh��)��(j��)����W(xu��)��(x��)�ߵ������Ԇ�Ԫ�y�c���y�ɿ��������c�w�|(zh��)�����y�u��(sh��)��(j��)���c�̎��ھ����ӆ���Ȕ�(sh��)��(j��)��Ȼ��Y(ji��)�όW(xu��)��(x��)�߂��w���༉�Լ��W(xu��)У����ķ���ģ�ͣ��т��w�cȺ�w�ԌW(xu��)����ͨ�^�C���˶˳ʬF(xi��n)�o���L�͌W(xu��)��(x��)�ߡ����ڃ�(n��i)�õ�֪�Rۙ�ȌW(xu��)��(x��)��ģ���c�A���Ե�֪�R�y�u��Ϣ�����Ԍ��r���W(xu��)��(x��)�ߵ��J(r��n)֪�؈D�����Ƿ����ծ�(d��ng)ǰ�W(xu��)��(x��)��Ԫ��֪�R�c���Ķ��ӑB(t��i)�{(di��o)���W(xu��)��(x��)�ߵČW(xu��)��(x��)��(n��i)�ݺ͌W(xu��)��(x��)�YԴ���W(xu��)��(x��)��Ҳ����ֱ���c�Լ� �Ă��Ի��J(r��n)֪�؈D�������x����W(xu��)��(x��)��֪�R�c��̌W(xu��)�YԴ����S�ȵČW(xu��)��(x��)����Կ�ҕ����ʽ�ʬF(xi��n)�o�W(xu��)��(x��)�����L�����˽��A���ԌW(xu��)��(x��)�Ĕ�(sh��)��(j��)�����x����W(xu��)���������B(y��ng)ˮƽ����(y��u)��֪�R�c����Ӌ�^����ҕ�l�YԴ��(sh��)���ȡ��W(xu��)��(x��)���ڼ��c�C���˵Ļ��ӌW(xu��)��(x��)���ھ��W(xu��)��(x��)�О飬��W(xu��)��(x��)��(n��i)�ݡ��^���r�g��ͣ��W(xu��)�Ƶ���Ϣ��Ҳ���Ԃ�ݔ�����o�W(xu��)У�̎��ˣ������̎����r�˽�W(xu��)��(x��)���ڼ��еČW(xu��)��(x��)��B(t��i)��
(��) �W(xu��)��(x��)��������
����(j��)�A���ԌW(xu��)��(x��)���l(f��)�F(xi��n)�Ć��}���ߌW(xu��)��(x��)�ϵK�������C���˿����Z�����ьW(xu��)��(x��)����L��ͬ�r������(j��)�W(xu��)��(x��)Ӌ�������ǻیW(xu��)�顱�����C���˿���������o��ͨӍģ�K���B�ӌW(xu��)��(x��)���֙C�������ֱ������֭h(hu��n)�ȿɴ����O(sh��)�䣬ۙ�W(xu��)��(x��)�ߵČ��rλ�ã������m��(d��ng)�r�g������W(xu��)��(x��)������W(xu��)��(x��)�߲��ڼ�ͥ�W(xu��)��(x��)�^(q��)���δ�ܰ��r��ɌW(xu��)��(x��)Ӌ�������ǻیW(xu��)�顱�����C���˿��l(f��)����ָ��ƶ����A(y��)��ʩ���Ą��䰴�r�W(xu��)��(x��)��
(��) �W(xu��)��(x��)��鼤��
�C������Ҫ����(d��o)�W(xu��)��(x��)�������^�õ��˙C�P(gu��n)ϵ�c����B�Y(ji��)��ʹ�W(xu��)��(x��)����Ϥ�c�C���˽�����;���ͷ��������w���ԣ����ǻیW(xu��)�顱�����C��������݆�����У���ͨ�^��Ȼ�Z�ԡ���Ę�R�e���Α�ȷ�ʽ��������ҽ�B���W(xu��)��(x��)����Ϣ�ɼ�( ������Ę���� �����W(xu��)��(x��)���A(ch��)�ͱ�����) �c�惦���˙C����ģʽ�O(sh��)�õ�( ���Z�������|�������ȷ�ʽ) ���ڴ˻��A(ch��)�ϣ��C����������Ę�R�e��䛹��ܣ��ڴ_�J(r��n)�����������ݺ͂��w��Ϣ�Ļ��A(ch��)�ϣ�����(j��)�W(xu��)��(x��)�ߵ�ƫ�ò��ò�ͬ�L(f��ng)��Ľ�����ʽ���ǷQ����(chu��ng)�O(sh��)���όW(xu��)��(x��)�����c�ČW(xu��)��(x��)������ͬ�r���C���˶������������W(xu��)��(x��)�ߵČW(xu��)��(x��)��w�c��ע�ȵ���Ҫָ��(bi��o)���r�O(ji��n)�y�����֪���W(xu��)��(x��)��̎��ؓ(f��)��W(xu��)��(x��)��B(t��i)�r�����|�l(f��)��Ԓ�������棬���W(xu��)��(x��)���M��ԃ�����c�W(xu��)��(x��)���M�зǽ̌W(xu��)��(n��i)�ݵ������� ����h�W(xu��)��(x��)�߶̕���Ϣ���Ķ��M��W(xu��)��(x��)�ߚw�ٸ������ǻیW(xu��)�顱�����C����Ҳ���÷e�ֵȪ���C�ƣ�������ȷ�ʽ������ߌW(xu��)��(x��)�ߵĄ��θС�
(��) ���L��������
���ǻیW(xu��)�顱�����C�����܉�������L�����֡�������ͨ�^�W(xu��)��(x��)�ߵĂ��w�J(r��n)֪�؈Dչʾ�ȣ��������L�o��(d��o)�W(xu��)��(x��)�ߡ�������L�W(xu��)��֪�R������ͨ�^�C���˵Ć�������ԃ������⡣ͬ�r�������C����߀�����ڼ�ͥ��������LҎ(gu��)���W(xu��)��(x��)�ߵļ�ͥ�W(xu��)��(x��)��(n��i)���c��ӕr�g���_����ͥ���������_չ��
�塢څ���cչ��
(һ) �������I(y��)��
��(d��ng)ǰ���S���҃�(y��u)�|(zh��)�Ľ̌W(xu��)�YԴ��Ȼ����̎����n����A(ch��)�M���O(sh��)Ӌ�������C����ֻ��ᘌ�ijЩ�ض��W(xu��)��(x��)��(n��i)�ݵĺ���֪�Rӛ���M�н̌W(xu��)�����ᘌ������C���˵����c���̌W(xu��)�YԴ�M���_�l(f��)�������C���˽̌W(xu��)������플��O(sh��)Ӌ�����I(y��)�W(xu��)�Ƶ�֪�R�D�V���O(sh��)�������J(r��n)֪�ƌW(xu��)�Ľ̌W(xu��)���Ԍ�ʩ�ȣ����ǽ����C��������������I(y��)������Ҫ���ϡ�
(��) �������ܻ�
��̎��c�W(xu��)��(x��)�ߵČ��r�����c�������Լ��r�M��W(xu��)��(x��)�ߴ��ɽ�������߀���ԝM��W(xu��)��(x��)�ߜ�ͨ���_(d��)����������˙C�����ȼ��g(sh��)�IJ��ÿ��Խ��͌W(xu��)��(x��)���c�����C����֮�g�Ľ����ֵ�����C�֮�g��Ϣ�����ı���Ժ�ͨ���ԡ��S���˹������I(l��ng)����Ȼ�Z��̎�����g(sh��)�İl(f��)չ�������C������Ҫ����佻������Ȼ�Ժ�Ч�ԣ��猍�F(xi��n)�̌W(xu��)Ŀ��(bi��o)�(q��)�ӵ����쌦Ԓϵ�y(t��ng)������(d��o)�W(xu��)��(x��)���ڽ���������ض��W(xu��)��(x��)�΄�(w��)��ʹ�����߂�������x�������ԡ�
(��) ��֪�龳��
��ͬ�Ľ��������ͽ̌W(xu��)��(n��i)�ݣ�ͨ����Ҫ���W(xu��)��(x��)���M�в�ͬ�S�ȵ��^������⡣��ˣ������C������Ҫ����(j��)��ͬ�Ľ̌W(xu��)�龳�����Ӹ�֪�W(xu��)��(x��)�ߌW(xu��)��(x��)��B(t��i)����W(xu��)��(x��)�h(hu��n)���������C���ˌ�����Խ��Խ�S����Ƕ��ʽ����������h(hu��n)���c�ɴ����O(sh��)��ȿ��Ԟ����ṩ���A(ch��)��(sh��)��(j��)�������˹������I(l��ng)����龳��֪�c���Ӌ��ȼ��g(sh��)�������C������Ҫ�߂䌢�@�(sh��)��(j��)�D(zhu��n)���ɿ��Ԍ��W(xu��)��(x��)�߃�(n��i)����w����ע�ȡ�����������M�и�֪�����������ڴ˻��A(ch��)���ṩ���m��(y��ng)�̌W(xu��)����(w��)�c֧��
|